
引子
在自动驾驶和机器东说念主限度,濒临犬牙相制的环境,已毕快速且准确的旅途推敲无疑是现时推敲的重中之重。这一挑战在多远隔物环境中尤为权贵,由于非凸避碰不停的存在,传统的旅途推敲身手常常难以胜任。
非凸避碰不停:相通来说,等于在多远隔物环境中,机器东说念主需要幸免碰撞时,其可行驶的安全区域不是一个浮浅的、容易描绘的凸体式,而是一个复杂的、难以平直处理的非凸体式。这种情况使得通达推敲问题变得愈加复杂和拦截
RDA _ROS
来自香港大学、南边科技大学、澳门大学、中国科学院深圳先进技艺推敲院、香港科技大学(广州)的推敲东说念主员建议基于松灵Limo模拟器设备的自主导航名堂RDA_ROS。有关论文发表于IEEE Robotics and Automation Letters和IEEE Transactions on Mechantronics。
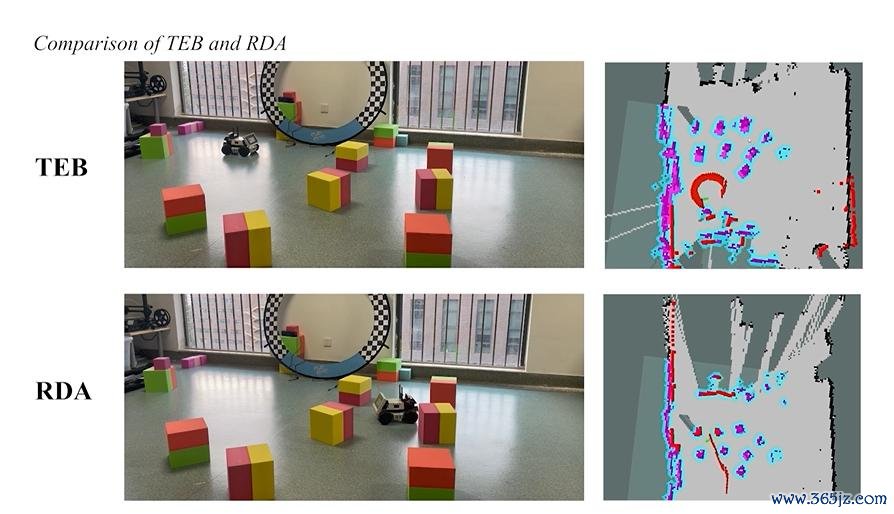
该推敲旨在处罚在复杂环境(包括密集远隔物、动态远隔物等)下自主导航的快速旅途推敲问题,通过建议一种加快无碰撞通达推敲器(RDA),已毕了碰撞幸免的并行筹谋、体式感知推敲战略以及静态和动态远隔物的识别与粉饰,欢乐了实时性和高精度条目,并具有平素的兼容性。
开源代码畅通RDA planner: https://github.com/hanruihua/RDA-plannerRDA_ROS: https://github.com/hanruihua/rda_ros
有关论文Han, R., Wang, S., Wang, S., Zhang, Z., Zhang, Q., Eldar, Y. C., ... & Pan, J. (2023). RDA: An accelerated collision free motion planner for autonomous navigation in cluttered environments. IEEE Robotics and Automation Letters, 8(3), 1715-1722.Li, G., Han, R., Wang, S., Gao, F., Eldar, Y. C., & Xu, C. (2024). Edge Accelerated Robot Navigation With Collaborative Motion Planning. IEEE/ASME Transactions on Mechatronics.
RDA Planner
RDA Planner 是一种高性能、基于优化的模子测度收尾 (MPC) 通达推敲器,专为在复杂拥堵环境中的自主导航而想象。讹诈乘子轮流方针法 (ADMM),RDA 将复杂的优化问题瓦解为多个浮浅的子问题。
这种瓦解使得每个远隔物的避碰不停不错并行筹谋,大大普及了筹谋速率。
主要特色:
体式感知推敲:或者处理具有任性凸体式的机器东说念主和远隔物,确保在种种场景中的种种性。高精度收尾:通过高等优化求解器已毕精准的收尾轨迹,增强导航可靠性。动态远隔处理:撑握静态和动态远隔物,确保在赓续变化的环境中发扬出色。实时性能:提供适应实时应用的快速筹谋时辰,确保实时决策和反馈。种种化通达学撑握:兼容种种类型的机器东说念主通达学,包括差速运行、阿克曼转向和全向系统,为不同的机器东说念主平台提供天真性。
RDA _ROS
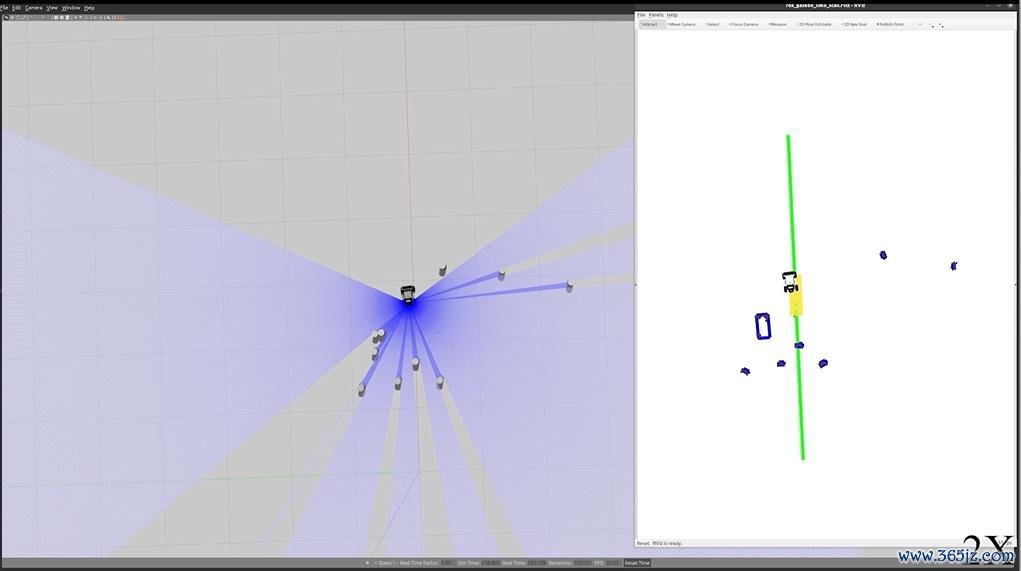
RDA_ROS 名堂是 RDA 推敲器的 ROS 包装器,旨在促进动态避障和在拥堵环境中的自主导航。该软件包与 ROS Noetic 兼容,并使用 Python >=3.8,或者与 CARLA 和 Gazebo 等仿真器具无缝集成, 基于LIMO机器东说念主的仿真环境设备了接口及样例。RDA_ROS 专注于实时通达推敲,为从事高等机器东说念主应用设备的设备者提供了一个庞杂的处罚决策。
绽放、分享、协同
松灵机器东说念主自缔造以来,一直秉握着赋能设备者的理念,尽力于为机器东说念主行业和科研素养构建全面的设备平台。通过分享资源、疏导想想、合营改进,共同构建愈加完善的机器东说念主历练数据集和测试平台,为机器东说念主的学习和历练提供愈加丰富和种种的素材。
迎接更多高校与科研机构与咱们联袂共创,共同探索更多新的应用场景和技艺方针,为机器东说念主的平素应用和智能化发展孝顺更多的贤慧和力量。
往期资讯
ECCV 2024亮点!RoboTwin:首个双臂协同机器东说念主战略学习Benchmark赌足球app官网入口